
Research Drone
- Free worldwide shipping
- In stock, ready to ship
Research and teaching drone
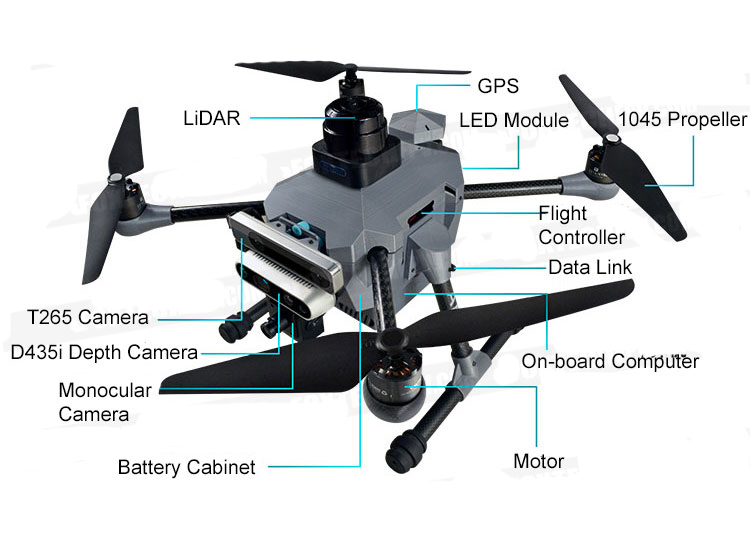
Description: The sensors on the P450 include(T265 camera, S1 lidar, JETSON Xavier NX, depth camera D435i, monocular camera)
UAV experimental platform, suitable for UAV professional application research and development. This development platform is based on Prometheus open source
Project, providing rich demo routines, covering control module, slam module, planning module and target detection module, etc.
A number of research directions related to UAVs and machine vision help UAV scientific research and development, and are committed to making research and development more efficient.
Specifications
Weight (approx.): 1550g (without battery), 1950g (with battery)
Size: 335mm*335mm*230mm (length*width*height)
Diagonal wheelbase: 410mm
Maximum payload: 1600g
Maximum take-off weight: 3550g
Maximum flight time: Outdoor 13min39s; Indoor 10min23s; Hovering accuracy: ±1m (under GPS) Wind resistance class: 3-4
Working environment: indoor/outdoor
Working temperature: 6℃-40℃
Flight control:
FMU processor: STM32 F765
Accelerometer: ICM-20699
Magnetometer: IST8310
Power module output: 4.9~5.5V
IO processor: STM32 F100
Gyroscope: BMI055
Barometer: MS5611
USB power input: 4.75~5.25V
Weight: 158g
Size: 44*84*12mm
Firmware: PX4 firmware
Working temperature: 40~85 degrees
Board computer
Model: Jetson Xavier NX
Hashrate: 21 TOPS
CPU: Six-core NVIDIA Carmel ARM v8.2 64-bit
GPU: NVIDIA Volta architecture, 384 NVIDIA CUDA cores + 48 Tensor cores
Storage: 64GB
RAM: 8GB DDR4
Display: mini HDMI
Interface: mini PCIe*1; USB 3.0 TypeA*1; USB 2.0 TypeA*1; Micro USB*1; Ethernet port*1 Others: SPI+GPIO multiplexing*1; I2C; UART
Battery:
Model: 4S 4000mah 1piece
Effective capacity: 4000mAh
Battery weight: 374g
Use voltage: 14.8V-16.8V
Minimum voltage: 14.8V
Storage voltage: 15.2V
Battery interface: XT60
Battery type: LIPO lithium battery
Working temperature: 0℃-60℃
Remote controller:
FS-i6S
Binocular camera:
Model: Intel Realsense T265
Chip: Movidius Myraid2
Field of View: Two fisheye lenses combined with a nearly hemispherical 163±5.
IMU: BMI055 Inertial Measurement Unit allows accurate measurement of device rotation and acceleration
Depth Camera:
Model: Intel Realsense D435i
Depth Technology: Active Infrared Stereo
Depth stream output resolution: up to 1280*720
Depth stream output frame rate: up to 90fps
Minimum depth distance: 0.1m
Lidar:
Model: LDS-50C
Laser ranging technology: TOF
Measuring radius: 0.15m~40m
Sampling speed: 9200 times/second
Ranging accuracy: 2~10cm (typical value 5cm)
Ranging resolution: 1cm
Scanning angle: 360°
Scanning frequency: 7~15Hz (typical value 10Hz)
Monocular camera:
Model: USB Monocular Camera
Focal length: 3.6mm
Field of view: 90°
Pixels: 2 million
Maximum resolution: 1920*1080
Software parameters
Board PC:
Model: Jetson Xavier NX
System: Ubuntu 18.04 Username: amov Password: amov
Jetpack: 32.4.3
Cuda: 10.2
ROS: melodic
opencv: 3.3.1
realsense SDK: 2.2.36
realsense ROS: 2.2.15
Prometheus software:
version:v1.0-stable
5:Features
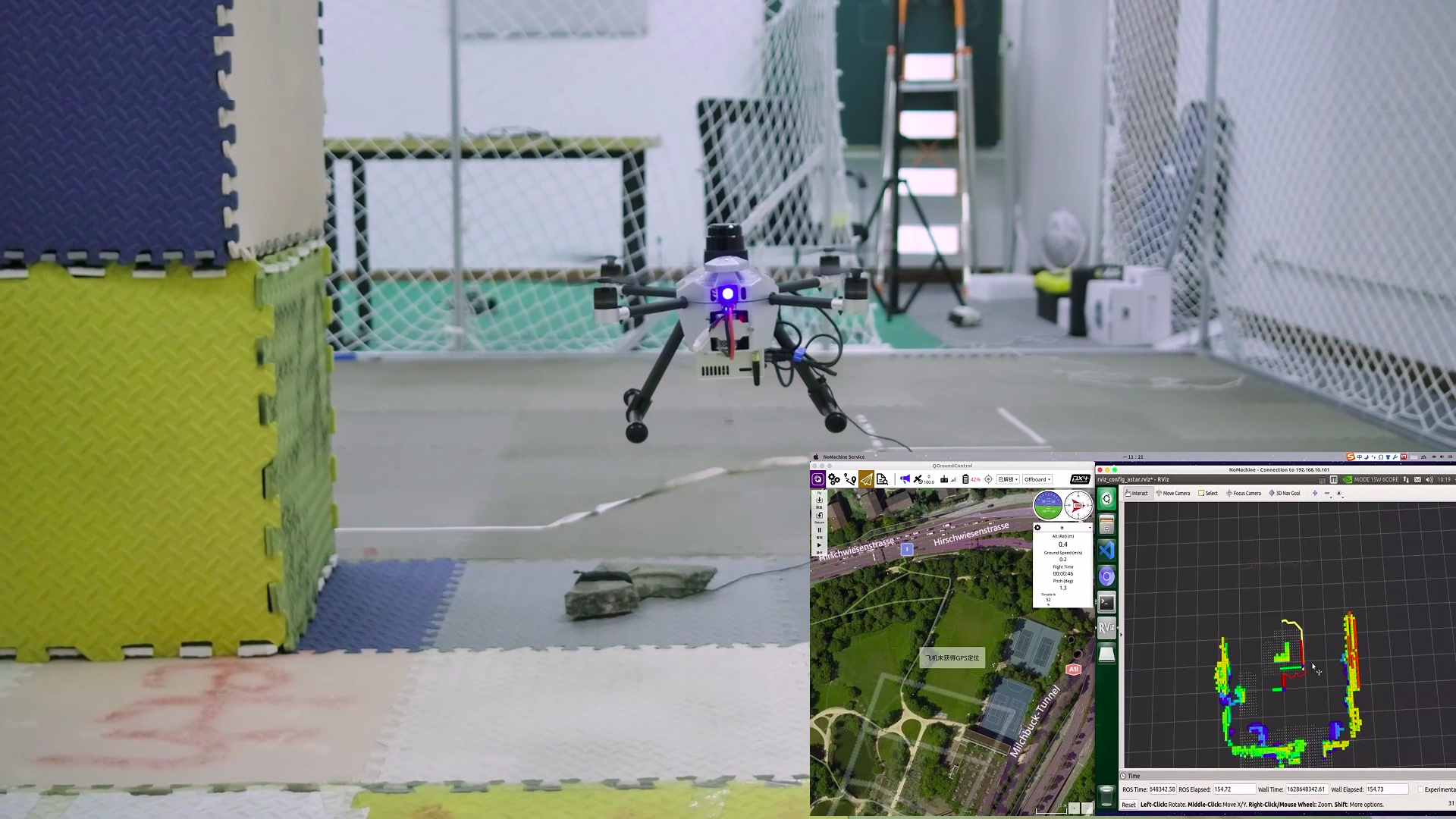
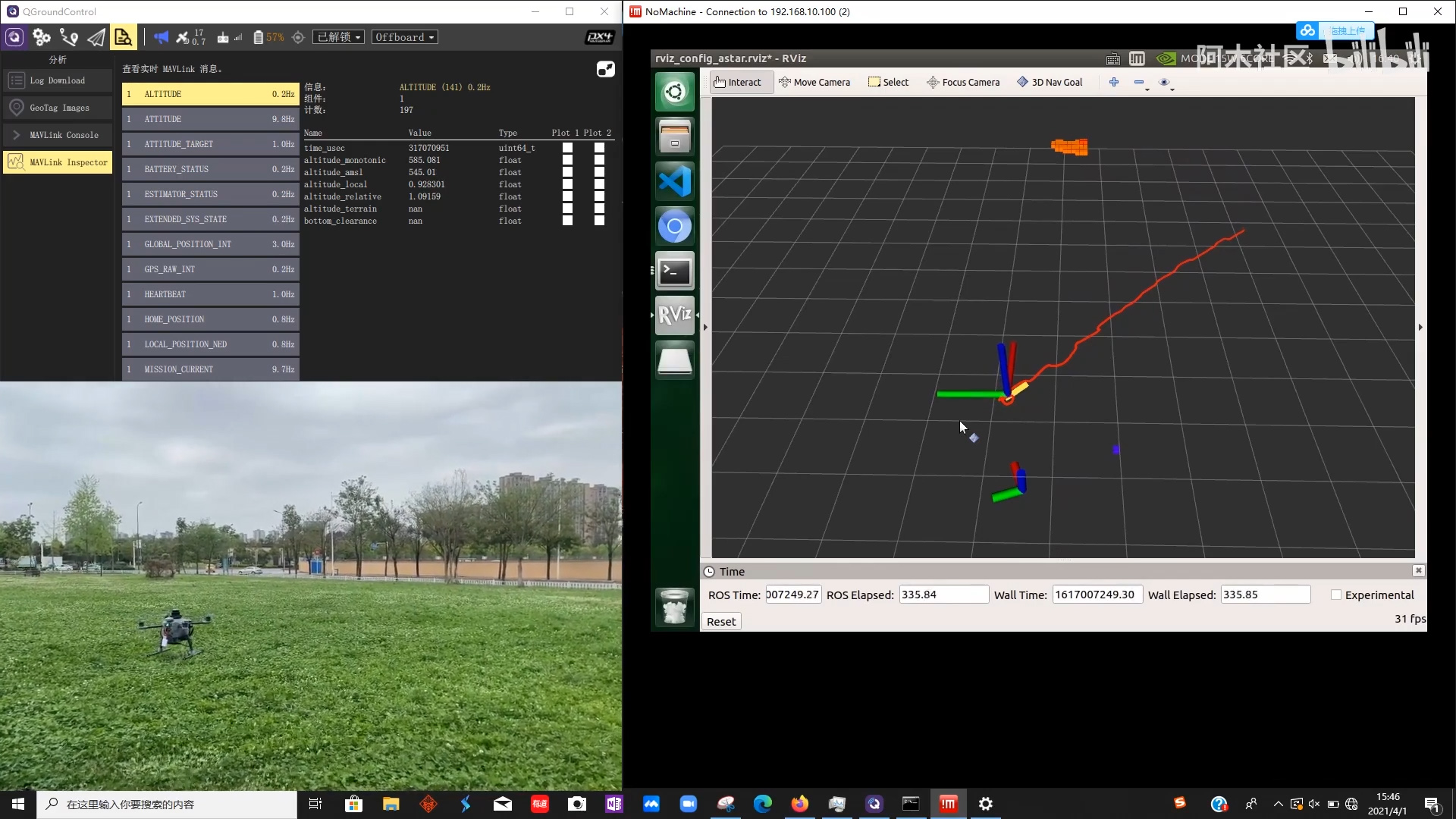
Software part: The prometheus system adopts modular design and is divided into four modules, flight control module, slam module, planning module and target detection module. The P450 product combines the prometheus system to achieve a total of eight indoor and outdoor functions, indoor pointing, indoor landing, indoor tracking, indoor obstacle avoidance, outdoor pointing, outdoor landing, outdoor tracking, outdoor obstacle avoidance, etc. Realize the perfect fit from simulation to real machine.
Achievable functions: indoor and outdoor binocular VIO fixed-point hovering, indoor and outdoor lidar obstacle avoidance, indoor and outdoor vision-guided landing, indoor and outdoor frame detection and tracking, GAZEBO simulation, fastplanner visual obstacle avoidance
P450 function introduction:
Control module
1. Realize the communication between the onboard computer and the flight controller with the help of the MAVROS function package. 2. Provide a simple and convenient control command interface, including one-key unlocking, take-off, hovering, landing,
Emergency locking, control commands (position control, speed control or combined control) under the inertial system and machine system, trajectory tracking, etc.
3. Detailed wiki documentation instructions and code comments, integrated development environment, no need to modify the PX4 firmware source code.
Slam module
Provide rich mapping demos, including RTAB-Map, Octomap and D435I+T265 environment mapping
Planning module
1. Provide a wealth of planning demos, including APF local planning, VFH local planning, and Astar global planning
2. Fastplanner implementation and trajectory optimization demo
Target recognition module
1. Image recognition based on Opencv, providing rich demos, including digital recognition, ellipse
Detection, multi-QR code detection, color recognition, YOLO general target detection, frame selection tracking, etc.
2. Detailed wiki documentation instructions and code comments.
Task module
1. Combine the above modules to provide simple and rich application-layer application cases, including autonomous landing, circular frame penetration, waypoint tracking, color line tracking, digital recognition, target frame selection tracking, waypoint planning and other demos.
2. Provide detailed wiki instructions and code comments, easy to modify and highly reusable.
Gazebo emulation
1. The simulation environment software system can use virtual engine technology to provide a realistic environment, simulated power and sensing, and a built-in flight controller, which can simplify the initial setup process and make UAV simulated flight easier. This function can improve test test efficiency through control and state estimation algorithms, which is more advantageous than embedded high-cost debugging and development.
2. P450 provides simulation tutorials corresponding to real machine functions, with detailed wiki instructions for use
Various problems encountered in the simulation environment.
Hardware part: Modular design, which can be flexibly matched with airborne equipment. The composite material body can effectively reduce the weight of the whole machine and effectively prolong the battery life. The semi-closed fuselage design further improves the protection ability and effectively reduces the interference of airflow


Use collapsible tabs for more detailed information that will help customers make a purchasing decision.
Ex: Shipping and return policies, size guides, and other common questions.